|
I am a senior research scientist at DeepMind. I completed my PhD in 2020 at UC Berkeley, advised by Professors Sergey Levine, Pieter Abbeel and Trevor Darrell, and supported by the NSF Graduate Research Fellowship. I have previously interned at OSARO, Google Brain, and DeepMind. I completed my B.S. in Computer Science at Harvey Mudd College. Google Scholar / GitHub / Dissertation Talk email: [firstname].[lastname][at]gmail.com |

|
|
5th Inter-experiment Machine Learning Workshop and EP-IT Data science seminar: Beyond Pick and Place - Tackling Robotic Stacking of Diverse Shapes. 2022 Research and Applied AI Summit: Modularity for Robot Learning. 2019 |
|
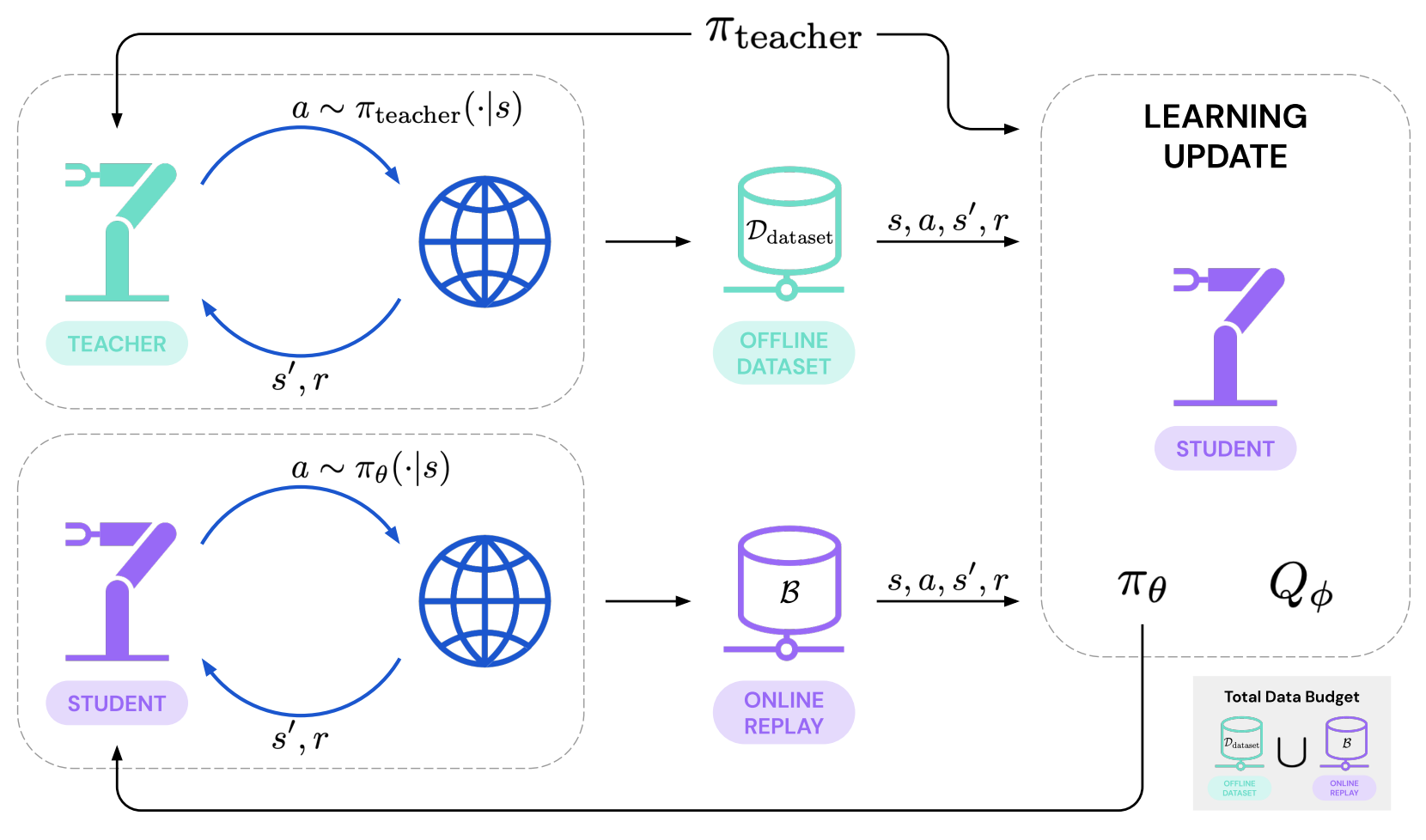
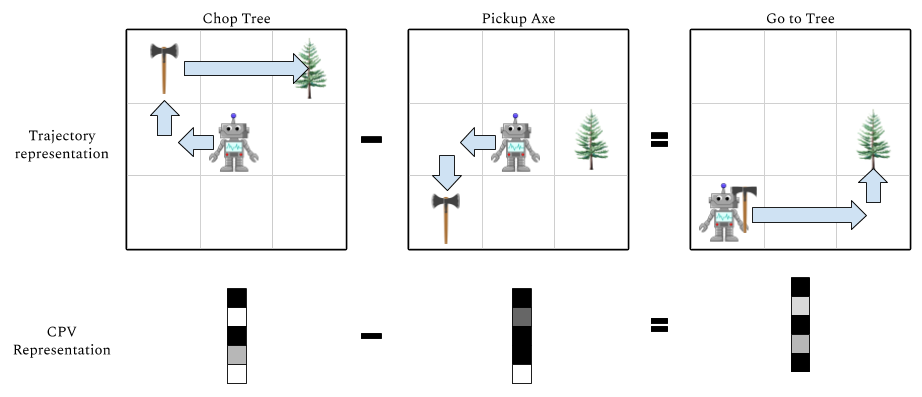
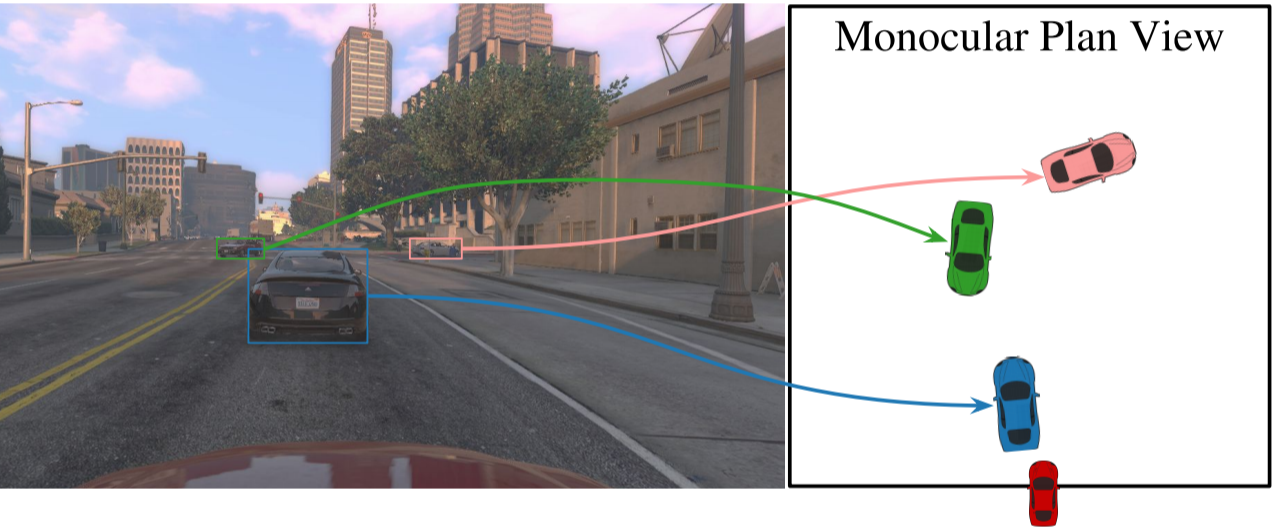
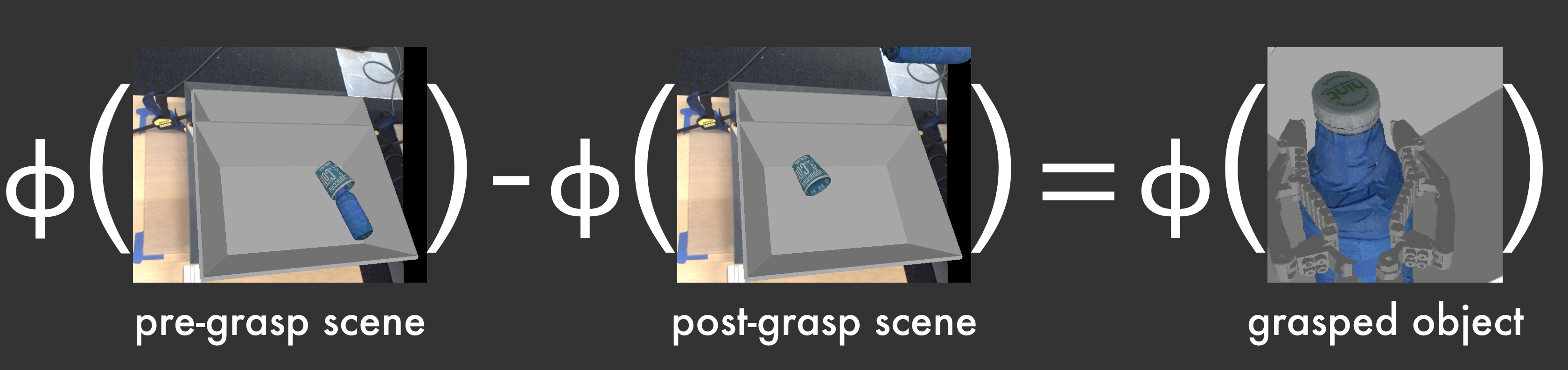
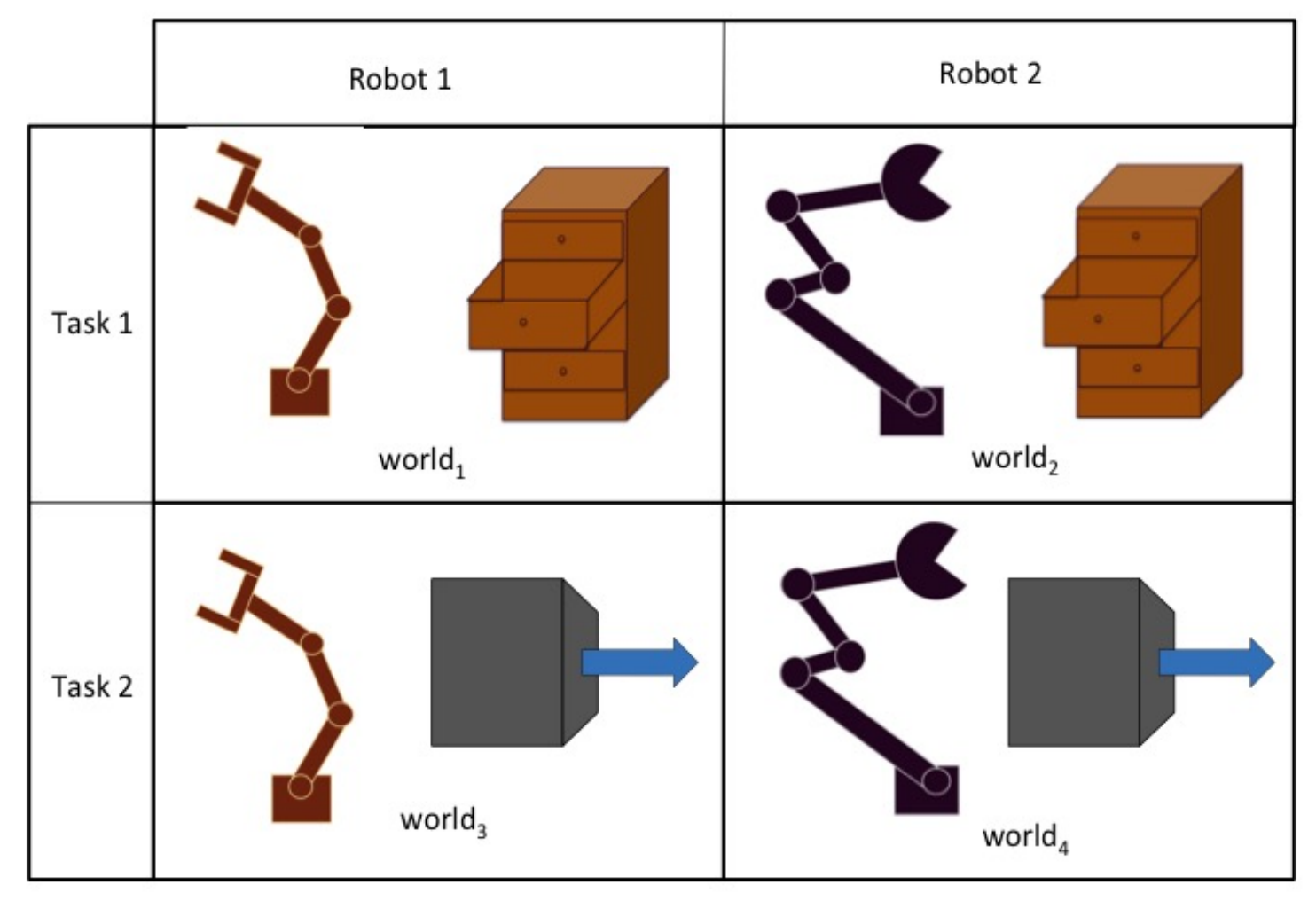
My research is robot learning, with an emphasis on approaches that can show compositionality and generality in tasks, objects, and environments. |
|
|
|
|

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Website template from Jon Barron.
|